BallonBot
Group Research Project
Jun - Sep 2024
Advisors:
Dr. Chongyang Wang, Prof. Chun Yu
Keywords:
Human-robot interaction, Social robot,
User studies
This project introduces BalloonBot, a helium-based social robot for domestic spaces, designed to provide emotional companionship, fitness coaching, spatial sensing, and indoor navigation. Through a study with 33 participants, BalloonBot was shown to enhance emotional well-being, assist with exercise and object tracking, and offer a quieter, softer alternative to traditional robots. The study’s findings support BalloonBot as a promising social robot with potential for further refinements in stability and interactivity for daily use
[Preprint]
Understanding Users’ Perceptions and Expectations toward a Social Balloon Robot via an Exploratory Study
Chongyang Wang, Tianyi Xia, Yifan WANG, Gang Yu, Zixuan Zhao, Siqi Zheng, Manqiu Liao, Chen Liang, Chun Yu, Yuntao Wang, Yuanchun Shi (2025)
The Manuscript is under review at ACM Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT)
My Contributions
-
Participated in the design and implementation of the balloon robot.
-
Designed a GUI for real-time control of the balloon robot.
-
Contributed to the user study and subsequent data analysis
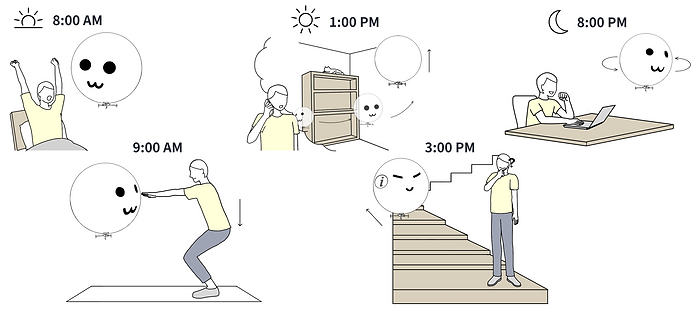
Daily use examples of BalloonBot in domestic scenes:
At 8:00 a.m., BalloonBot flows over to wake up the user.
One hour later, it becomes a fitness coach, guiding the user through exercises with a touch-oriented design.
At 1:00 p.m., BalloonBot is the housekeeper, helping locate a roaming cat at home.
By 3:00 a.m., BalloonBot in the library assists the user in book searching across different building levels.
Finally, BalloonBot provides relaxing and supportive companionship while the user works on their laptop.
.png)
Designing and Implementing the BalloonBot
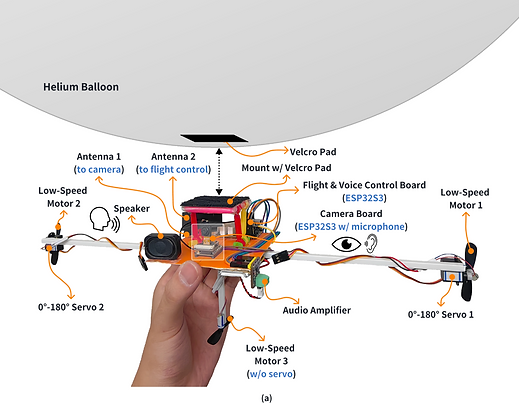
The mechanical part of BalloonBot comprises two control boards hosting a bunch of devices, two orthogonal-connected plastic rods (with the longer horizontal one hanging a servo and a motor on each end, and the shorter vertical one hanging a motor), and the plastic Lego-like standing mount attached with a Velcro pad.
(a) Overview of the hardware design and implementation of BalloonBot.
.png)
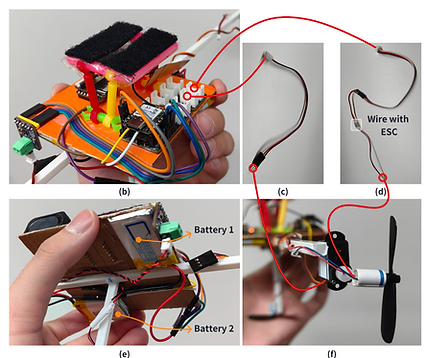
(b) The flight and voice control board from the backside view.
(e) Two batteries are attached to the downside surface.
(f) The lateral view of the servo and motor, which are connected via the wires shown in (c) and (d) with the flight control board, respectively.
.png)
Seeing and Listening (Camera Board)
One XIAO ESP323 microcontroller, ESP32SSense, manages the camera and microphone to optimize power and data processing. The camera captures 480x320 resolution images at 30 fps, balancing clarity and real-time performance, while the IS microphone provides precise audio data acquisition. Visual and audio data are transmitted to a computer in real-time via 2.4GHz Wi-Fi using the HTTP protocol.
Speaking and Moving (Flight & Voice Control Board)
The second ESP32S3 board handles voice output and mobility. It converts digital sound signals to analog for playback through a speaker. For motion, three motors and two servos enable precise 3D indoor movement, with Motor 3 compensating for buoyancy loss over time to maintain stable flight and effective horizontal motion.
The detailed model and weight of each hardware component.

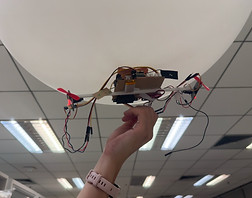
Crafting and testing.


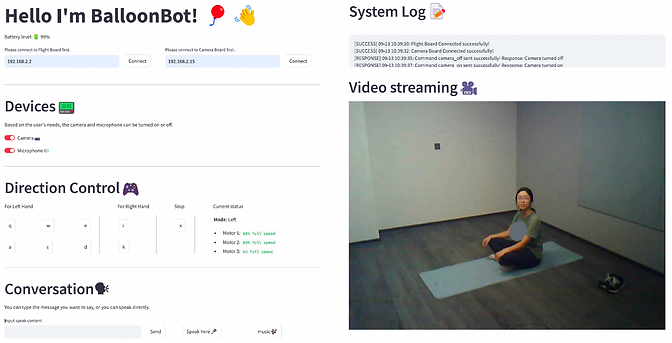
I developed a web GUI for the real-time control of the Ballon robot.
Kinetic and Noise Evaluation
Within a room with no wind and a baseline environmental noise of 34 dBA, we evaluated the kinetic performance andnoise level of BalloonBot with neutral buoyancy.
Kinectic Performance
We recorded the time spent per unit distance (i.e., 10cm for moving in a line and 30◦ forrotation) of BalloonBot in its major motion categories to demonstrate its speed and steadiness. It should be noted that the forward direction of BalloonBot is the facing direction of its camera. As shown in Figure, BalloonBot moves smoothly.

Ascending
Descending
Forward
Rotation
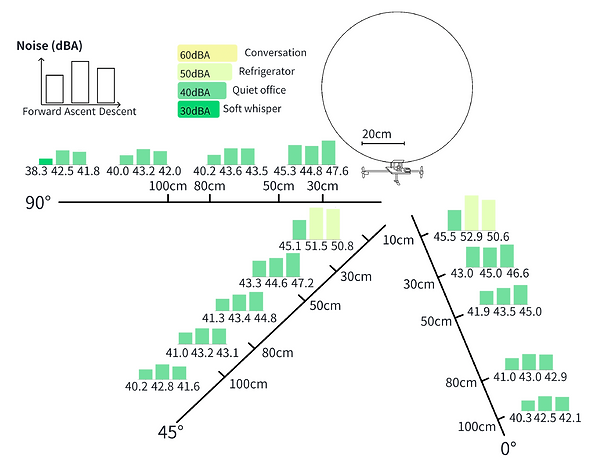
Noise Level
We set the motors responsible for forward/yaw rotation, ascent, and descent motions at their maximum speed and collected the distribution of noise levels along different distances across three representative directions.
Use Cases
Fitness Coach: BalloonBot organizes fitness sessions with real-time instructions and feedback, enabling exercises like squats with shoulder raises, shoulder flexion, and neck stretching, where it serves as an aerial target to guide movements.
%20(1).png)
Housekeeper: Leveraging its hovering capability, BalloonBot enhances smart home management. For example, it can assist in locating a wandering pet across different rooms, showcasing proactive indoor monitoring.
%20(1).png)
%20(1).png)
Emotional Companion: BalloonBot provides emotional support by playing soothing music, offering comforting gestures like a "hug".
%20(1).png)
Indoor Navigator: With aerial mobility and voice interaction, BalloonBot facilitates indoor navigation in large spaces, overcoming terrain limitations faced by surface robots.
%20(1).png)
Lab Study
Video Stimuli with Wizard-of-Oz Designs
Due to the limited technical maturity of robots and the control panel used in research, reusable video stimuli were created to demonstrate BalloonBot use case scenarios. In a Wizard-of-Oz (WoZ) setup, an experienced pilot remotely controlled the robot’s flight and speech, using a web interface for real-time visual and audio feedback. Meanwhile, two volunteers interacted with the robot, believing it to be autonomous.
Participants
We invited 33 participants, including 16 male participants (M) (48.48%, mean age=37.38, std=13.50) and 17 female participants (F) (51.52%, mean age= 38.29, std=12.86).
Procedure
The experiment is divided into two sessions
i) the Stimuli Session: each participant was invited to watch the pre-recorded video demo of BalloonBot’s use cases and allowed to pause for any possible questions or opinions;
ii) Hands-on Session: the participant could touch and check the robot on their own and control via the web control Panel.
Measures & Data Analysis
We adopt a 5-Likert scale questionnaire covering four different sections:
-
Q1 familiarity (use frequencies or knowledge of robots);
-
Q2 attitude (Negative Attitudes toward Robots Scale, NARS);
-
Q3 perceptions about interaction;
-
Q4 expectations about functionality.
For perceptions of interaction presented by BalloonBot, we collected participants’ ratings across the following dimensions: i) Safety; ii) Noisiness; iii) Empathic Alignment (whether the participant find the robot and the user could understand each other); iv) Ease; v) Privacy;
Data analysis combined qualitative content analysis of interview responses with quantitative correlation analysis.
Results
Participants’ Perceptions about the Interaction Presented by BalloonBot

Participant’s Expectations given the Functionality Showcased By BalloonBot
